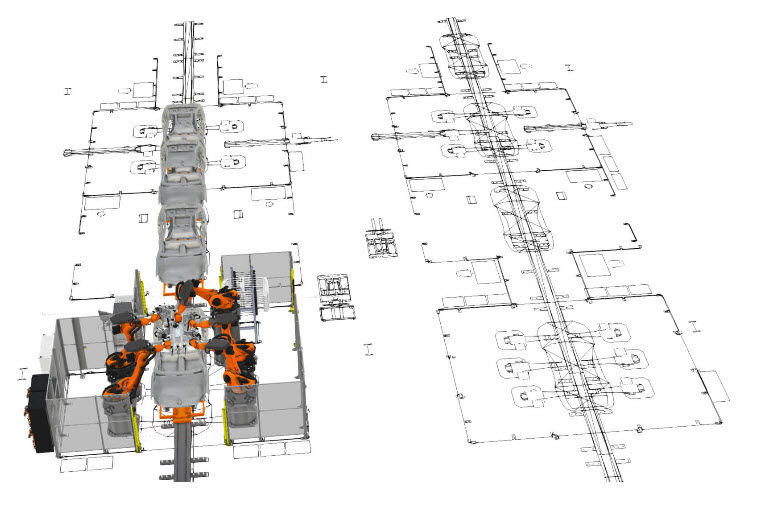
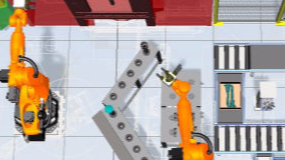
Logistikkonzept mit Roboteranbindung
Ermittlung des Flächen-bedarfs und Aufbau einer gesamten Produktions- und Logistikflläche für Guss-komponenten.
Pressen entladen
Entladen einer automatisch bestückten Formpresse. Ermittlung der benötigten Arbeitsflächen und zu erwartenden Taktzeiten.
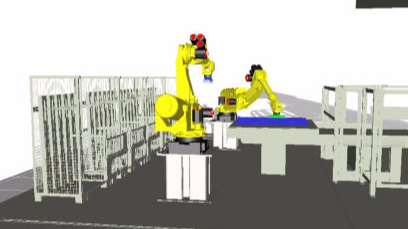
Strahlteile entnehmen
Wechselseitiges Be- und Entladen von Werkstück-trägern für Getriebeteile. Ermittlung der benötigten Aufstellflächen in Verbin-dung mit bereits existieren-den Anlagenteilen.
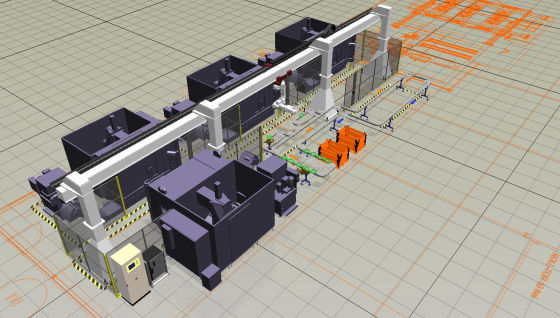
Strahlanlage beladen
Planungsbeispiel für eine geplante Neuanlage zur Kappazitätsvergrößerung.
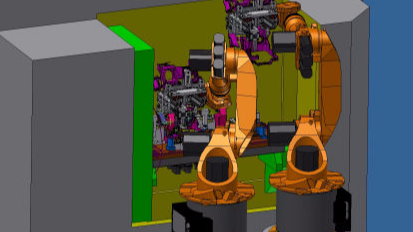
CNC - Anlage be-/ entladen
Planung von mehreren Bearbeitungszentren in unterschiedlichen Ausbaustufen. Prüfung der Zugänglichkeit mit zwei Robotern.
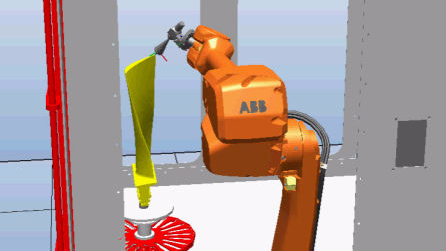
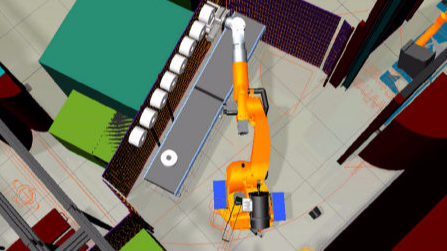
Oberflächenbearbeitung
Simulation eines Bearbei-tungs- und Ablaufzyklus für die Oberflächenbearbeitung einer Turbinenschaufel.